




Vo svete sa nachádza veľa ľudí, ktorí prišli o hornú končatinu, alebo sa narodili s vrodenou vadou. Týto ľudia majú jednoznačne sťažený život a sú pre nich problematické aj pre nás banálne činnosti. Hoci postihnutí majú k dispozícií ortopedické pomôcky, väčšina z nich má len estetickú funkciu. Sú k dispozícii aj protézy, ktoré dokážú vykonávať pohyby, avšak tieto protézy sú kvôli svojej cene dostupné len pre minimum postihnutých.
Výroba hlasovej protézy pozostáva zo všetkých prvkov mechatroniky. V rámci mechaniky to je pohyb jednotlivých prstov. Elektronická časť sa zaoberá rozpoznávaním hlasových príkazov a zasielaním impulzov do servo-motorčekov. Tým, aké pohyby má ruka vykonať sa zaoberá programovacia časť.
Charakteristickou vlastnosťou hlasovej protézy je to, že je ovládaná iba hlasom pacienta. Na pohyb jednotlivých prstov slúžia servo-motorčeky. Servo motorčeky sú umiestnené v predlaktí. Každý prst je ovládaný jedným servo-motorčekom. O tom, ktoré prsty sa majú pohnúť rozhoduje Arduino spolu s hlasovým modul EasyVR. EasyVR slúži na rozpoznanie príkazu. Rozpoznávanie funguje na báze hlasových frekvencií. Na napájanie Arduina slúži 9V batéria. Servo motorčeky sú samostatne napájané 7.2V Ni-MH batériu. Ako záložný zdroj slúži malý solárny panel, ktorý sa dá použiť namiesto 9V batérie. Na výrobu 3D modelu sme použili 3D tlačiareň da Vinci 1.0 AiO.
Arduino je open-source platforma založená na mikrokontroléri ATMega od firmy Atmel a grafickom vývojovom prostredí, ktoré vychádza z prostredia Wiring (podobný projekt ako Arduino, teda doska s mikrokontrolérom a IDE) a Processing (prostredie pre výuku programovania). Arduino môže byť použité k vytváraniu samostatných interaktívnych zapojení alebo môže byť pripojené k softvéri na počítači (napr.Macromedia Flash, Processing, Max/MSP, Pure Data,SuperCollider). Momentálne je možné kúpiť verzie, ktoré sú už skompletované; schéma a návrh plošného spoja je dostupný pre tých, ktorí si chcú postaviť Arduino sami.
Arduino Uno
EasyVR
EasyVR modul je viacúčelový modul rozpoznávania reči navrhnutý tak, aby sa doň dali ľahko pridať univerzálne príkazy a následne sa dali hlasom jednoducho rozpoznať. Tento modul rozpoznáva hlasové príkazy a následne ich posiela na spracovanie Arduinu.
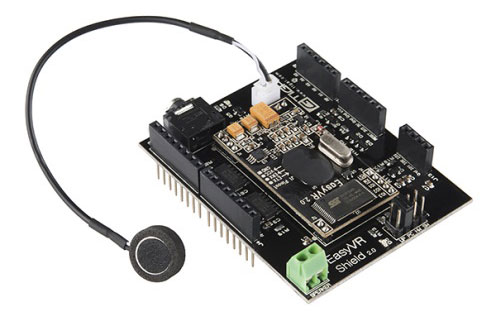
EasyVR
Ruka si vyžaduje pre optimálne používanie dva zdroje napájanie. Prvý sa používa pre Arduino. Je ním 9V batéria. Na napájanie servo motorčekov sa používa, samostatná, 7.2V Ni-MH batéria. Týmto spôsobom napájania vydržia obidve batérie dlhšie pracovať.
Alternatívne solárne napájanie
Na výrobu solárneho panelu sme použili solárne články. Jeden článok dokáže za ideálnych podmienok vygenerovať napätie 0,5V. Preto, aby sme dostali požadované napätie na napájanie Arduina sme použili 14 solárnych článkov. Solárny panel by mal za ideálnych podmienok vygenerovať napätie 7V.

Solárny panel
Servo je motor pre pohony(väčšinou elektrické, ale existujú aj hydraulické, penumatické či dokonca parné servá), u ktorých je možné na rozdiel od bežného motora nastaviť presnú polohu natočenia osi. Ovládajú sa ním napríklad posuvy u CNC strojov, nastavenie čítacej hlavičky na pevnom disku. Všetky RC(Radio Control) používajú malé modlárske serva. Servo tiež často pracuje na podstatne menších otáčkach, než je pre daný typ stroja obvyklé.
My sme v našom projekte použili servo motorčeky MG 995. Tieto serva dokážu pri napätí 6.0V vykonať ťah až 13.00 kg/cm.

Servo MG995
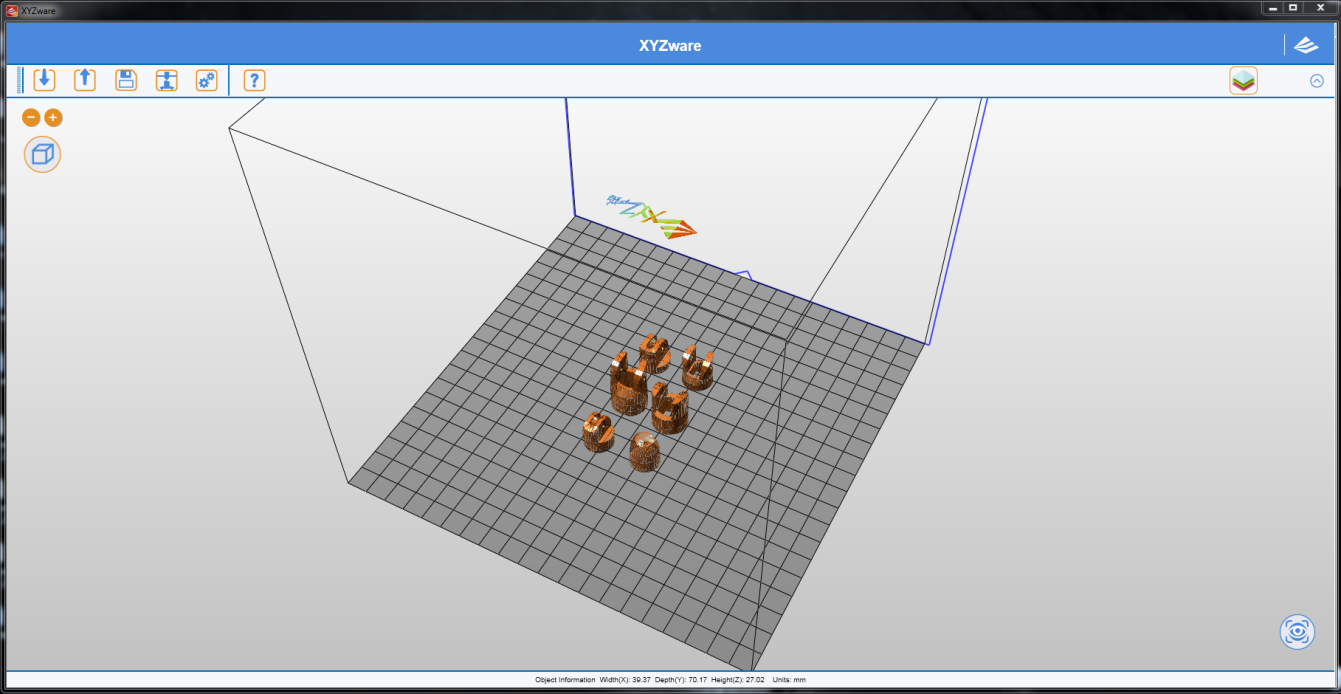
Na tlač 3D modelov sme použili tlačiareň XYZ da Vinci 1.0 AiO. Modely pochádzajú z open-source zdroja, pričom na ich upravovanie sme použili software Blender. Na tlačenie sme použili software XYZware. Tlačili sme pomocou materiálu PLA.
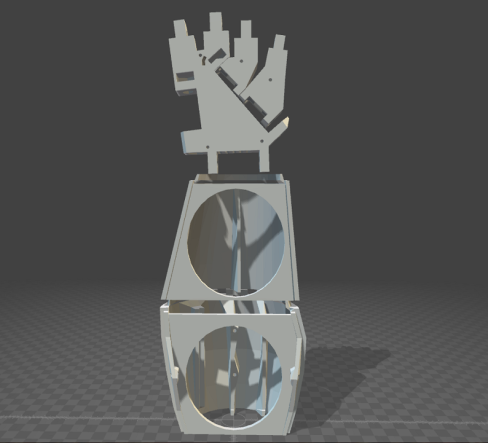
3D model predlaktia a dlane
Prostredie programu XYZware, kde sme si určovali vlastnosti tlačených modelov. Medzi tieto vlastnosti patrila hrúbka tlače, počet vrstiev, rozmery vrstiev a rýchlosť tlače. Pri pomalšej rýchlosti model vytlačený kvalitnejšie ako pri vyššej rýchlosti.
3D model ukazováka
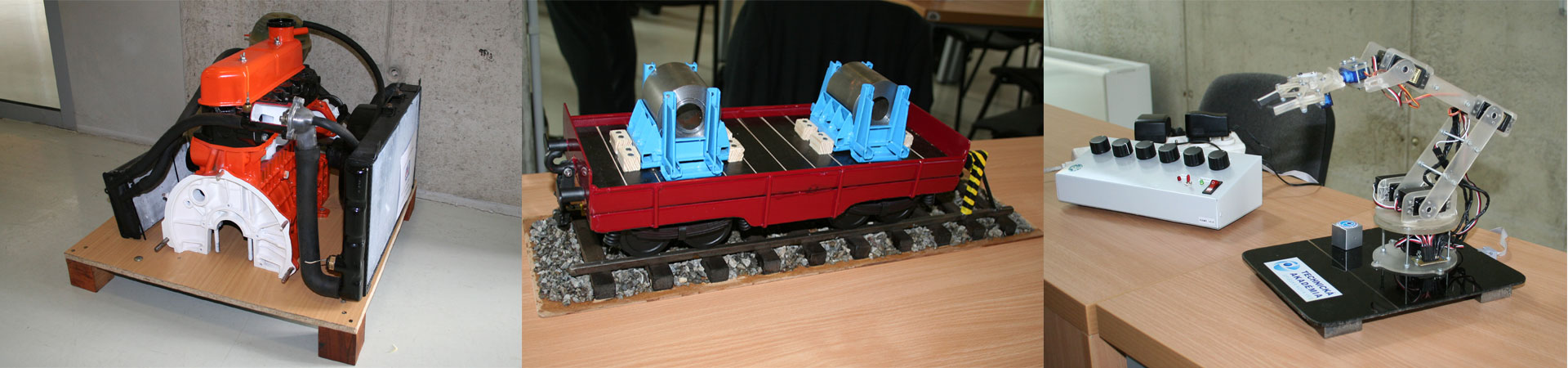
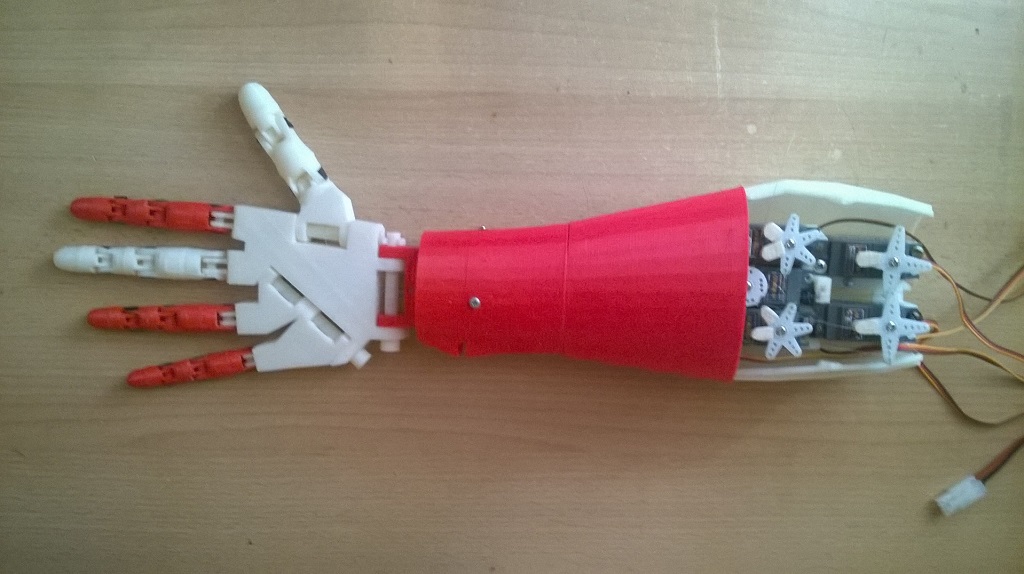
V rámci praktickej časti sme vytvorili dva prototypy protéz. Prvý prototyp je konštrukčne zhotovený z materiálov, ktoré sú bežne dostupné. Servá sme umiestnili do predlaktia, ktoré je vyrobené z MDF dosky. Dlaň a prsty sme vyplnili vatou a do prstov sme umiestnili silonové vlákna. Tieto vlákna sa ťahajú až ku hlavám servo motorov a umožňujú pohyb prstov.
Servo motory bol upravené z pôvodných 180° na 360°, takže sa dokážu otáčať neobmedzene okolo svojej osi. Túto úpravu sme vykonali odobraním potenciometra z rezistora a pridaním rezistora s kapacitou 10kΩ. Taktiež sme z hlavy serva zbrúsili zábranu, ktorá servu znemožňovala vykonať pohyb väčší ako 180°. Preto, že sme zo serva odobrali potenciometer, sme museli upraviť aj Arduino kód.
V rámci programovacej časti sme programovali Arduino Uno R3. Najprv sme do Arduina nahrali kód, ktorý umožní komunikáciu Arduina s hlasovým modulom EasyVr. Potom sme pomocou Windows aplikácie EasyVR Commander 3.9.3 vytvorili príkazy, ktoré ma hlasový modul rozpoznávať. Príkazy sme nahovorili a následne im priradili premenné. Následne sme hlasový modul napojili na Arduino a pripojili na PC. Potom sme nahrali všetky hlasové príkazy do hlasového modulu. Potom sme ešte pomocou jazyka C++ v programe Arduino naprogramovali to, v akom rozsahu sa majú servá pohybovať a na ako dlho. Príkazy, ktoré sme nahrali do EasyVR sme taktiež zadefinovali v kóde a priradily im premenné. Nastavili sme podmienku, že na aktivovanie príkazov je potrebné vysloviť aktivačný príkaz. Servám si priradili pini. Nakoniec sme celý kód nahrali do Arduina.
Napájanie je riešené pomocou 7,2V a 9V batérie. 9V batéria slúži na napájanie Arduina a 7,2V batéria slúži na napájanie servo motorov. Servá sa s batéria spájajú Tamiya konektorom. Arduino sa s batériou spája
Na výrobu solárneho panelu sme použili solárne články. Jeden článok dokáže za ideálnych podmienok vygenerovať napätie 0,5V. Preto, aby sme dostali požadované napätie na napájanie Arduina sme použili 14 solárnych článkov a zapojili ich sériovo. Solárny panel by mal za ideálnych podmienok vygenerovať napätie 7V.
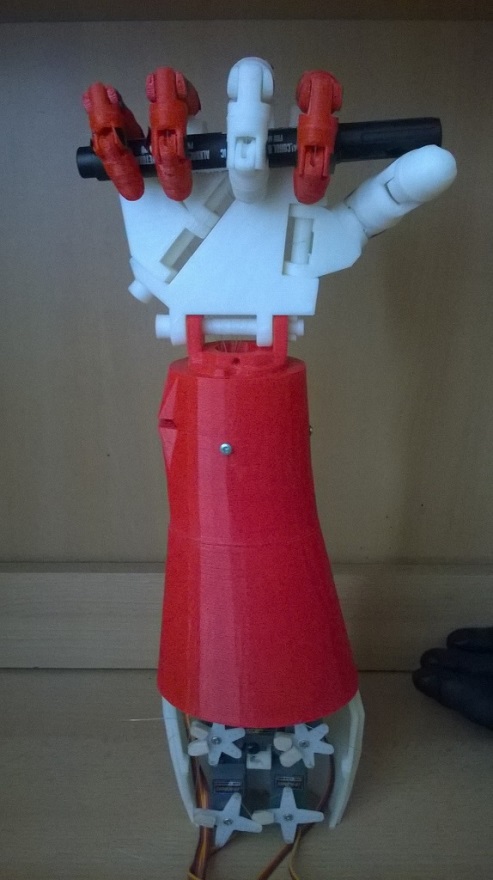
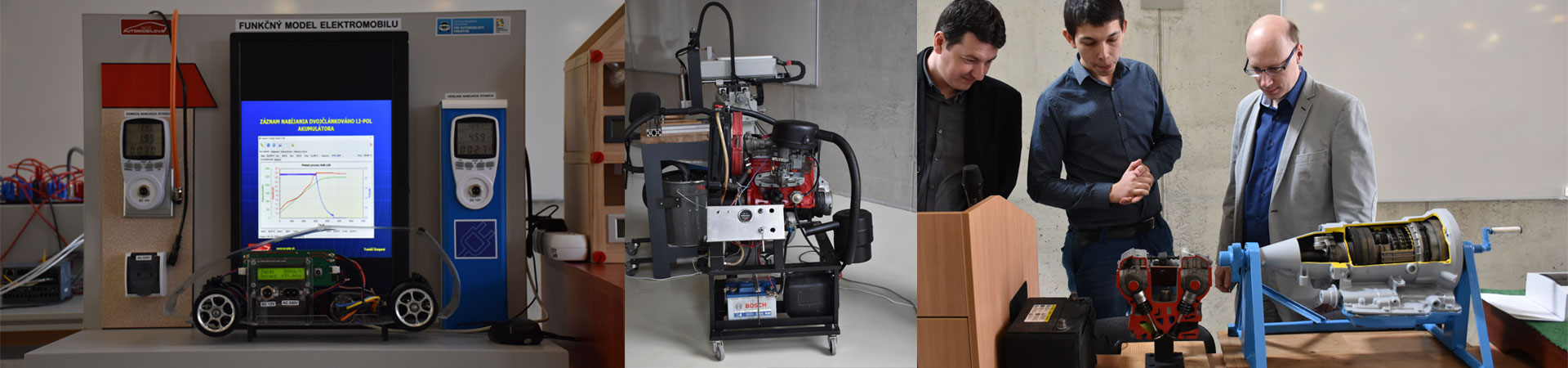
Výsledkom našej práce je hotový prototyp protézy ruky, ktorý dokáže byť ovládaný hlasom. Pacient bude mať možnosť s týmto prototypom vykonávať mechanické pohyby. Tieto pohyby zahrňajú bežné príkazy, ako vykonávanie gést, pohyb jednotlivých prstov, alebo napríklad úchop predmetov. Na pohyb jednotlivých prstov služia servo motorčeky. Servo motory sa aj po úprave pohybujú bez problémov. Vyrobili sme taktiež aj 3D model protézy pomocou 3D tlačiarne. Najnovšie sme zmechanizovali 3D protézu, takže už zvláda rôzne gestá, úchop, pohyby a podobne.

Hotový prototyp protéz
3D model protézy
Všetky stanovené požiadavky, ktoré sme si zadali na začiatku práce boli splnené. Vytvorili sme protézu, ktorá je ovládaná hlasom. Taktiež sme vytvorili model, ktorý je vytvorený pomocou 3D tlačiareň. Na rozdiel od klasických protéz, ktoré majú prevažne iba estetickú funkciu, má naša protéza za účel aj vykonávanie mechanických pohybov. Protéza je na výrobu finančne nenáročná, čím si ju môže dovoliť každý.