




Cieľom našej práce bolo vylepšiť existujúci jednoduchý model triediacej linky, riadenej PLC LOGO od spoločnosti Siemens. Východiskové zariadenie prenechali škole bývalí žiaci ako maturitný projekt. Chceli sme uplatniť modernejší riadiaci systém Simatic S-7 200, tiež od spoločnosti Siemens a použiť ho na triedenie materiálu na základe farby a povahy (kovový / nekovový materiál). Linku sme teda vybavili modernou senzorovou technikou, kompletne prepracovali dizajn zariadenia a celkovo veľmi výrazne povýšili úroveň modelu. Výstupom je tiež maturitný projekt v študijnom odbore Mechatronika.
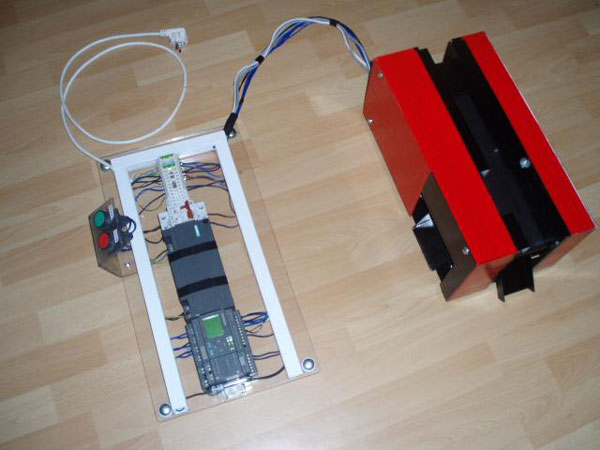
Obr.1 Projekt triediacej pásovej linky ovládanej pomocou LOGO! pred jej inováciou
Hlavný cieľ:
Súvisiace ciele:
Chceli sme aby tento model mal pohybujúci sa pás, na začiatku dopravníka bol zásobník s pneumotorom, ktorý nám bude podávať súčiastky na pás a následne ich triediť podľa materiálu a farby.
Po tomto uvažovaní sme začali už zhotovovať model nasledovne:
Tyče profilu L sme narezali na určité dĺžky a pozvárali, aby konštrukcia modelu pripomínala tvar kvádra. Navárali sme aj obdlžníkovú konštrukciu pre upevnenie zdroja, svorkovníc a ŠTART/STOP tlačidiel.

Obr.2 Hotová konštrukcia modelu
Po vytvorení konštrukcie sme sa snažili zhotoviť pásový dopravník, ktorý sme urobili z gumeného pásu natiahnutého na dvoch hriadeľoch. Tieto hriadele boli upevnené na tyče tvaru L, ktoré sme zhotovili podľa rozmerov konštrukcie. Na vstupný hriadeľ sme upevnili servomotor. Následne sme dopravník upevnili na našu konštrukciu.

Obr.3 Zhotovený pásový dopravník
Po osadení dopravníka sme umiestnili na konštrukciu plexisklo a na to sme následne uchytili náš zásobník a dvojčinný pneumotor, ktorý nám má vysúvať súčiastky.

Obr.4 Zásobník a a uchytenie priamočiarého pneumotora
Prichystali sme si všetky snímače a pripevnili sme ich na model tak aby dostatočne nasnímali materiály pohybujúce sa na pásovom dopravníku a v zásobníku.

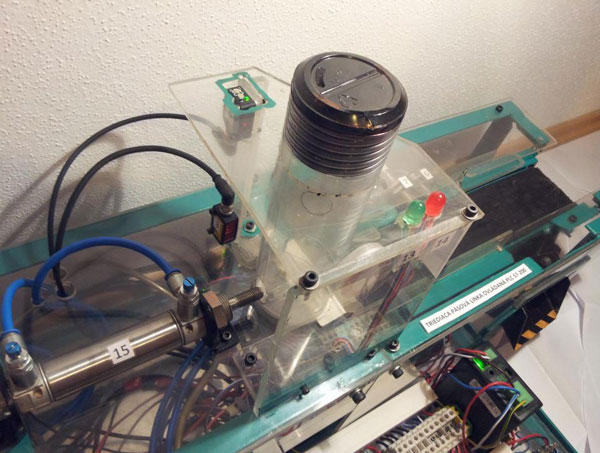
Obr.5 Uchytenie snímačov na zásobníku a dopravníku
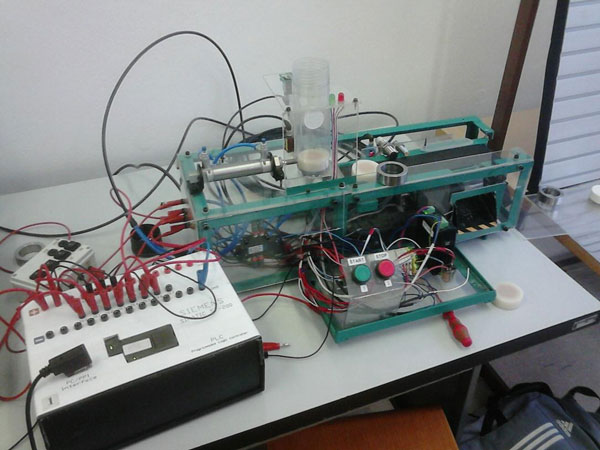
Po nastriekaní konštrukcie sme sa pustili do pneumatickej časti. Takto vyzerá zhotovený model ešte pred zapojením pneumatickej a elektrickej časti:

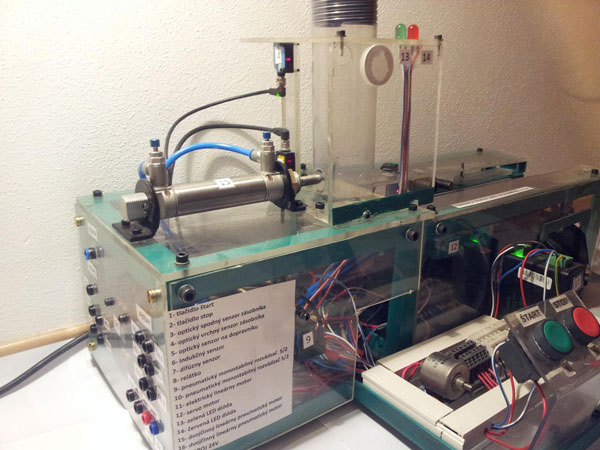
Obr.6 Zhotovený model bez elektrického a pneumatického zapojenia
Pneumatickú a elektrickú schému sme navrhovali v programe Fluidsim. Použili sme dva bistabilné rozvádzače 5/2 a dva dvojčinné priamočiare pneumotory. Navrhli sme elektrickú schému a následne sme jednotlivé prvky pospájali vodičmi. Tak isto sme aj pneumatickú časť pozapájali podľa schémy.
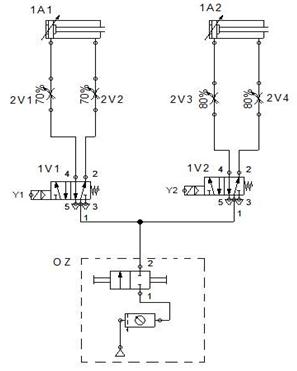
Obr.7 Pneumatická schéma
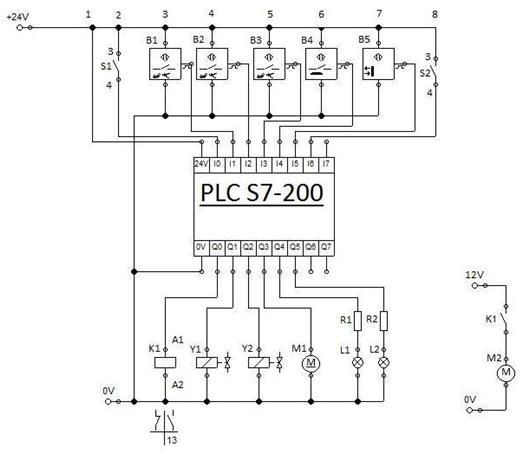
Obr.8 Elektrická schéma a pripojenie PLC, alokácia periférií
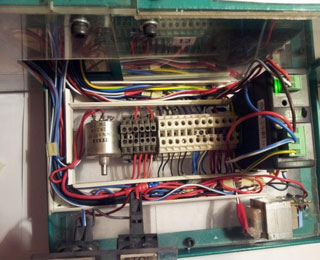

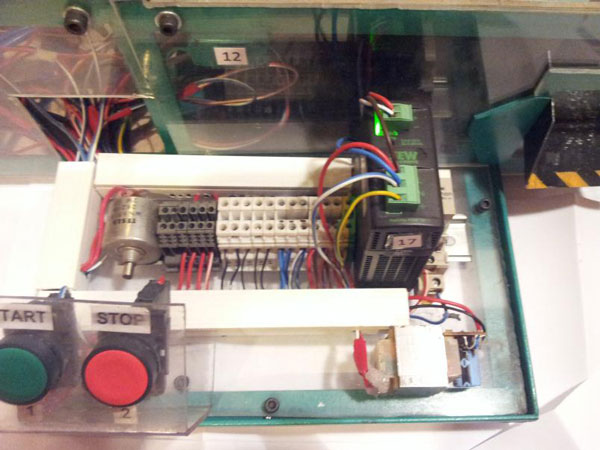
Obr.9 Hotové zapojenie a uloženie vodičov do PVC lišty a zapojenie pneumotora
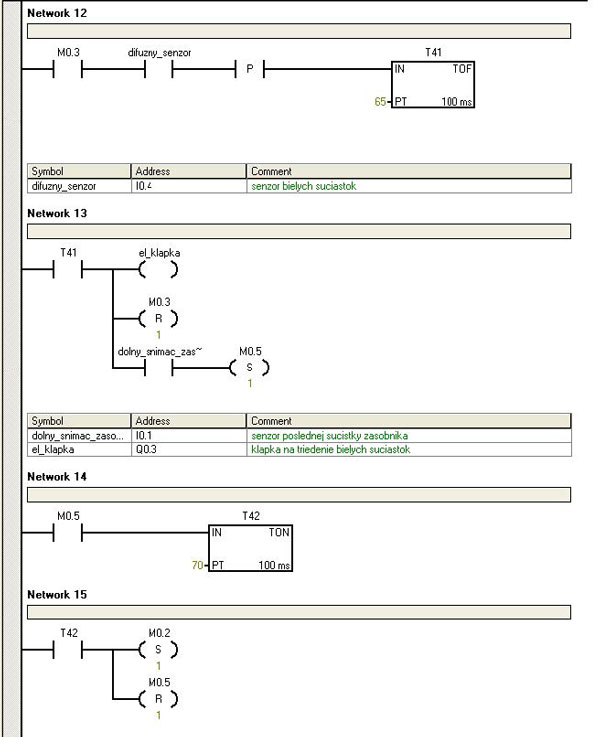
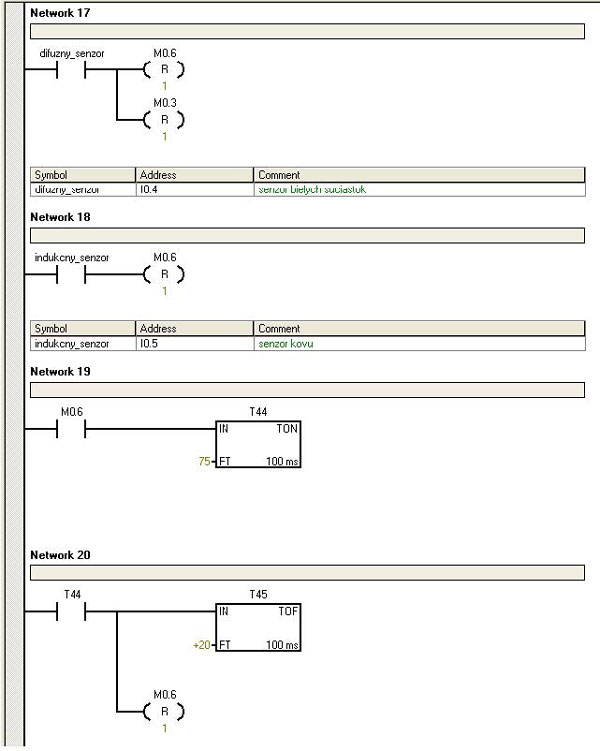
Potom ako sme mali zhotovený model ,zapojenú elektrickú a pneumatickú časť ,tak sme sa pustili do programovania. Programovali sme pomocou programu Step 7 Microwin32. Program je vložený do prílohy.
Obr.11 Ladenie zapojenia a programu v PLC laboratóriu školy
Vytvorili sme model triediacej linky určenej na podávanie a triedenie rôznych materiálov. Riadenie tohto modelu je vykonávané pomocou PLC automatu. (PLC SIEMENS S7- 200). K modulu dopravníka prikladáme aj našu verziu programu riadenia.
V našej práci sme dosiahli nami stanovené hlavné ciele:
Podávanie je plne automatické pokiaľ sa nachádzajú v zásobníku súčiastky ak tam niesu tak sa dopravník automaticky po roztriedení poslednej súčiastky vypne. Taktiež sme spravili kompletnú elektroinštaláciu a tu sme osadili do PVC listy.
Náš model nás naučil mnohým novým vedomostiam a zručnostiam z oblasti automatizácie, programovania a všeobecného strojárstva. Môže slúžiť na simuláciu podobných úloh riadenia dopravníkov a triediacich systémov pomocou PLC S7-200. Budúci žiaci sa môžu naučiť optimalizovať riadiace procesy, prispievať k zvyšovaniu produktivity výroby a tiež sa zoznámia s modernou snímacou technikou a pneumatickými akčnými členmi. Ovládanie modelu závisí od vytvoreného programu. Pri vypracovaní sme dbali tiež na dodržiavanie bezpečnostných štandardov.
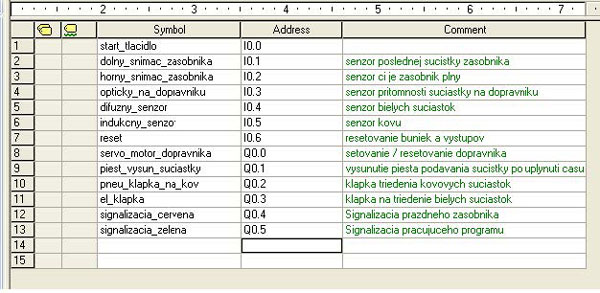
Obr.11 Symbol table
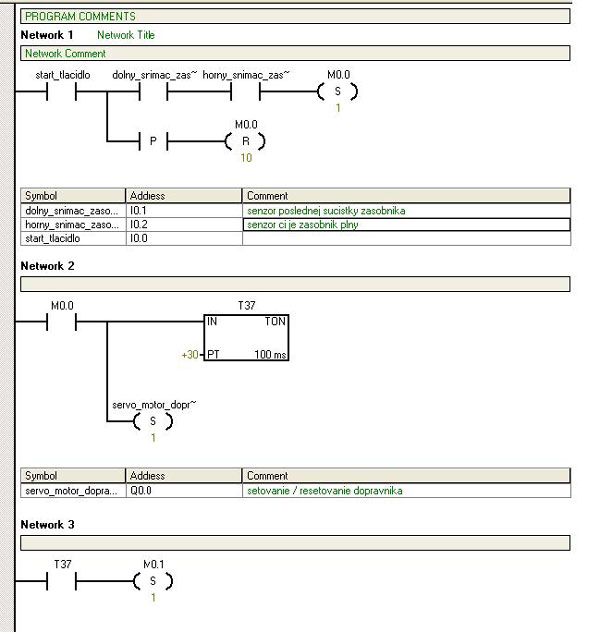
Obr.12 Program časť 1
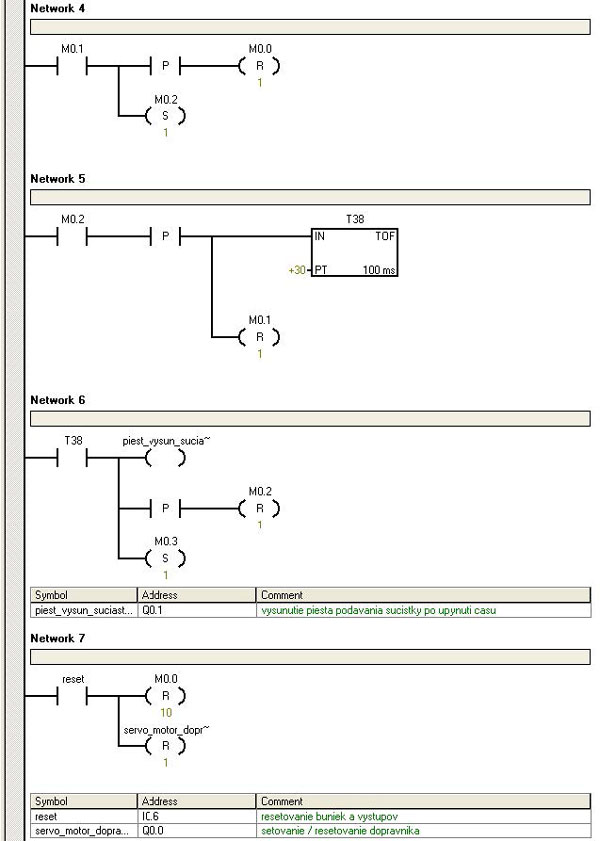
Obr.13 Program časť 2
Obr.14 Program časť 3
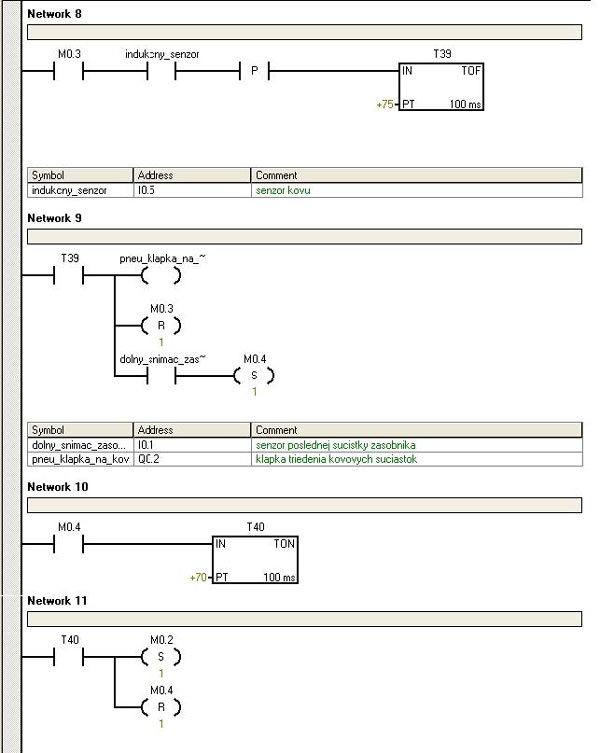
Obr.15 Program časť 4
Obr.16 Program časť 5
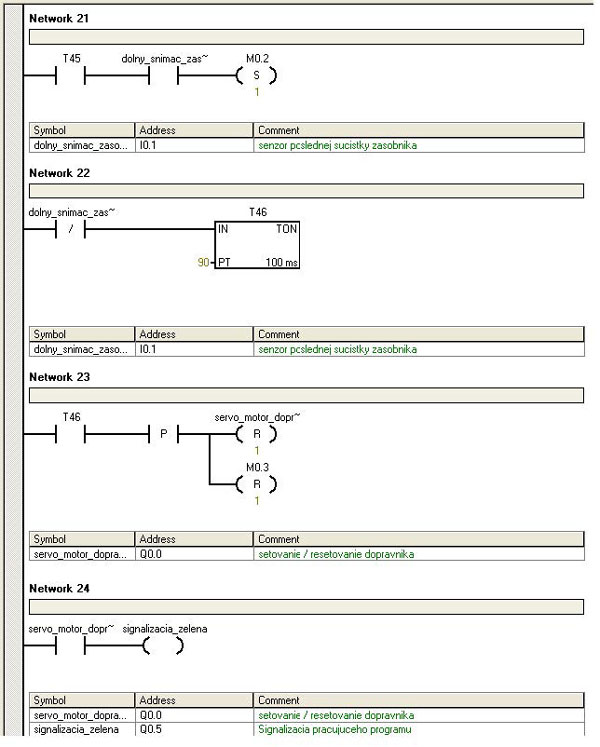
Obr.17 Program časť 6
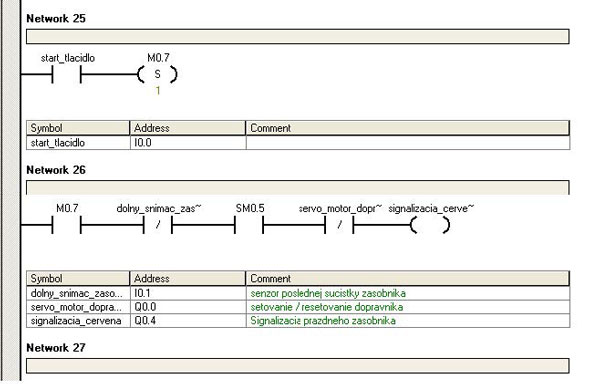
Obr.18 Program časť 7

Obr.19 Uchytenie senzorov
Obr.20 Zásobník, dopravník, pneumotor
Obr.21 Uloženie vodičov do PVC lišty
Obr.22 Hotový projekt
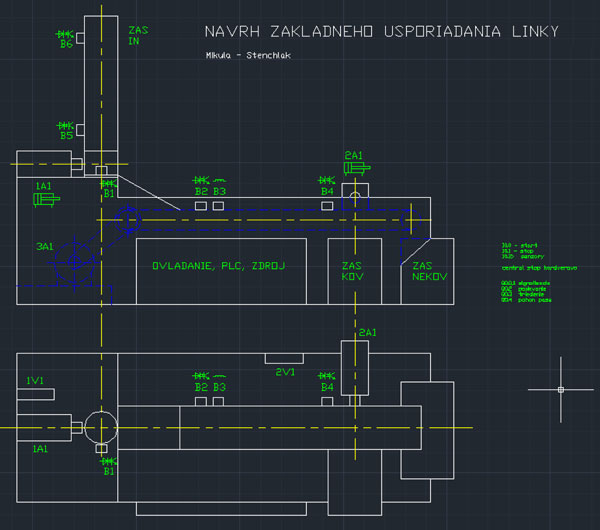
Obr.23 Predbežný návrh usporiadania linky
